
CV
Education
- B.S. in Hohai University, 2020-2024 GPA:3.7/4
- Summer School student in Zhejiang University - University of Illinois Urbana-Champaign Institute, ZJUI, 2023.7-2023.8 Score:99/100
Research experience
- 2021.11-NOW: Undergraduate Research Assistant in Blackant laboratory
A undergraduate intern in Computer Vision and Robotics in Blackant lab (Robot Motion and Vision Laboratory(Blackant), Hohai University). Research about muliti robots swarm project.
- 2022.6-NOW: Undergraduate Research Assistant
A DL intern in Fan Liu’s lab(AIM). Research about data driven flood forecasting.
Entrepreneurial experience
- 2021.11-NOW: Nanjing Yihai Robot Co., Ltd The company is an innovative start-up company formed by college students, and its main business direction is intelligent pet equipment. The entrepreneurship received 500,000 RMB entrepreneurial support from the Nanjing Municipal Government.
Competition Prizes
- National second prize in the Computer Design Competition(top 5%)(leader)
- National third prize of the China College Student Service Outsourcing Innovation and Entrepreneurship Competition(top 10%)
- National First Prize in the Metadata Challenge(top5%)
- Third prize of Jiangsu Computer Design Competition(top10%)
- Second prize of the Eastern Regional Competition of China College Student Service Outsourcing Innovation and Entrepreneurship Competition(top 10%)
- First Prize in the Web Design Competition(first place)
- Third Prize in the Installation competition
Scholarships
- Huawei Scholarship in 2023(top 5%)
- Academic excellent scholarship in 2020(top 10%)
- Technology innovation scholarship in 2020(top 10%)
- Technology innovation scholarship in 2022(top 5%)
- Academic Progress Scholarship(top 5%)
Projects
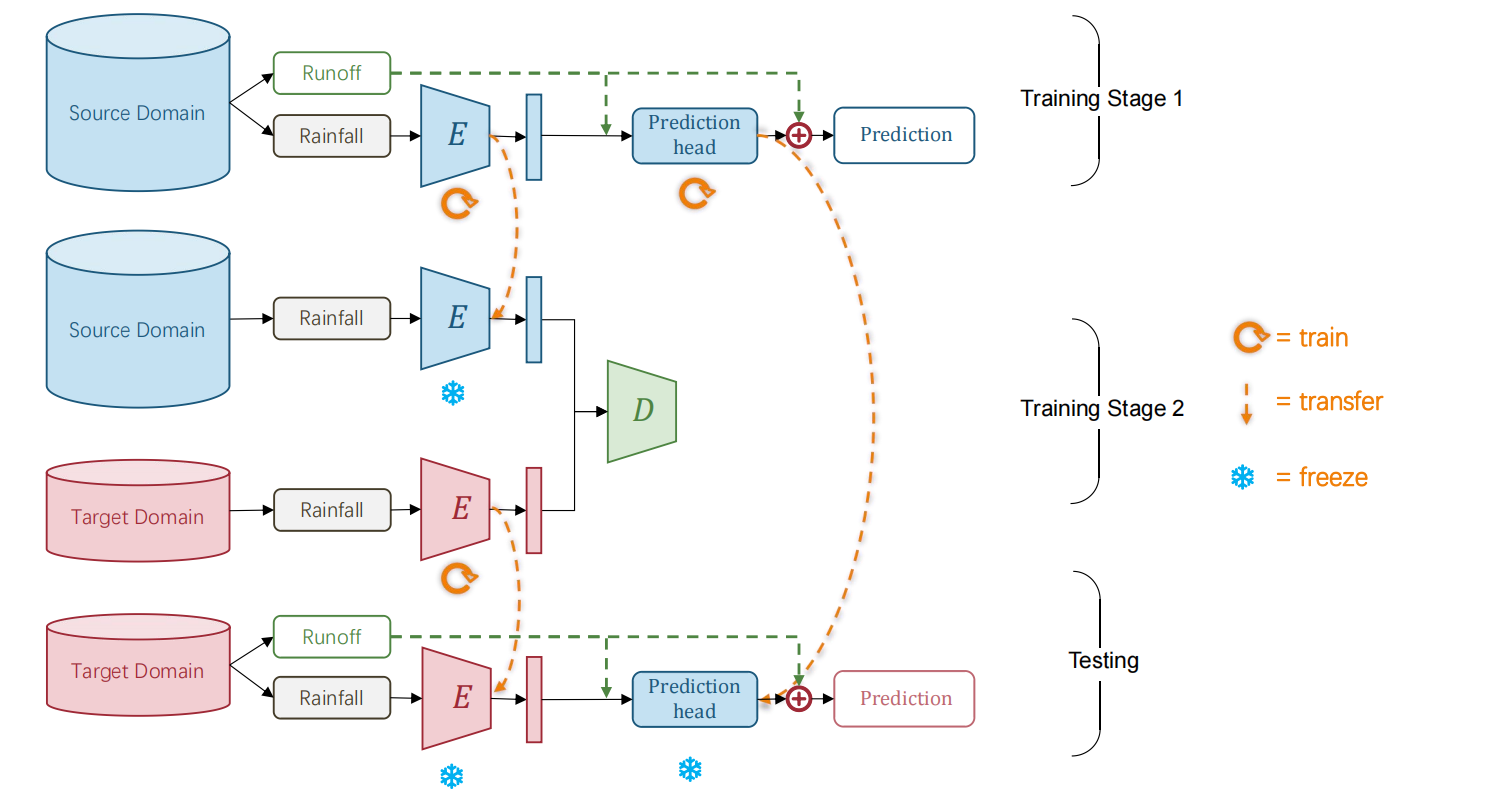
Data-driven hydrological time series forecasting
Research about Data-driven hydrological time series forecasting, using method such as LSTM, GRU, Domain Adaption. In order to solve the problem of insufficient data volume in flood prediction work, domain adaptive methods are proposed at this stage, but the current methods are mainly based on fully supervised learning, and semi-supervised learning methods will be investigated subsequently.
Multi-robots swarm
In this project, we identified a gap between simulation and real robots among the available solutions for robot swarm control research. We presented kk-swarms, a generalized and scaled open-source robot swarm platform, which crossed traditional control and modern reinforcement learning control of breaking the gap between no code simulation and real robot deployment. In this project, I mainly conritibuted in the development of pure-pursuit aligorithm.

Apachee Dubbo Kubernets
The main goal of the Apache Dubbo Kubernetes integration project is to provide a unified control plane and interface to simplify and optimize the deployment, management, and operation of Dubbo based microservices in the Kubernetes environment. Through integration, developers can more easily achieve automatic registration and discovery, load balancing, routing, monitoring, and other functions of services. At the same time, Kubernetes’ container orchestration capabilities can be utilized to achieve elastic expansion and automated operation and maintenance of microservices. You can find the code at https://github.com/apache/dubbo-kubernetes.

Publications
Service and leadership
- Currently the president of the Robot Association, with approximately 300 members.